对于截肢的患者来说,如果想要重新走路或者做其他事情就必须要安装假肢,但是,通常在安装假肢时存在医生安装时间长,病人无法自己控制假肢等问题,而近日来自北卡罗来纳州和亚利桑那州的研究人员探索了一种新的技术,通过使用虚拟现实和强化学习,使患者和临床医生都能更方便地安装假肢。除此之外,他们还开发出一种强化学习算法,可以将调整人工膝关节所需的时间从几个小时缩短到大约10分钟。
在夏洛特,OrthoCarolina的外科医生使用VR来证明出生时没有手的患者无需预先进行定向肌肉重新神经支配手术(创伤性截肢患者经常需要这样的手术),就可以控制假手。在罗利(Raleigh)、教堂山(Chapel Hill)和亚利桑那州坦佩(Tempe),工程学教授演示了一种基于强化学习的调整算法,可以将装配机器人膝盖所需的时间从几个小时减少到大约10分钟。
研究人员表示,这些突破表明,对于截肢者来说,一个方便和乐观的新时代可能即将到来。
参与研究的患者在COAPT完全控制室(COAPT Complete Control Room)的数字化虚拟现实单元上接受测试,以测量他们正常发育的手臂和缺手的一侧的表现。当病人专注于思考移动他们的手或移动肢体到手应该在的位置时,系统跟踪多个自由度,或在空间中移动手的不同位置的能力。安装在前臂上的传感器用来检测肌肉活动,从而决定了每只手臂复制假肢手部运动的准确性。
OrthoCarolina的手外科医生Michael Gart表示:“我认为如果没有VR,很难客观地做到这一点,很难衡量一个人的使用熟练程度,理论上可以这样做,但这是一种主观的解释,有了VR,外媒可以将虚拟肢体准确地定位在想要的空间中,只有当它们完全匹配时,它才算完成。这无疑有助于它的研究和发表。”
Gart和他的同事将在9月5日至7日举行的美国手部外科学会年会上展示这项研究的结果。
北卡罗来纳州和北卡罗来纳州生物医学工程联合系的教授Helen Huang表示,患者和临床医生的便利是NCSU/UNC/ASU项目背后的主流理念。在她的团队解决这个问题之前,没有稳定的模型可以让机器在调整机器人膝盖方面发挥更大的作用。
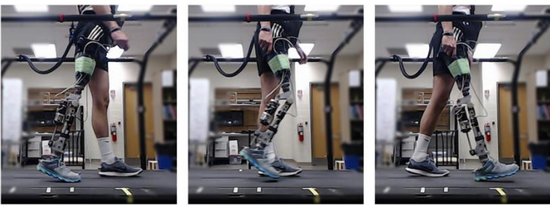
该方法通过随机设置性能参数给患者提供动力假肢膝盖;设备上的数据和患者的步态是通过设备中的传感器收集的。计算机模型调整设备上的参数,并实时将患者的步态与正常行走步态的轮廓进行比较。模型可以区分哪些参数设置提高了性能,哪些设置降低了性能。使用强化学习,计算模型可以快速识别允许患者正常行走的一组参数。在实验室中,模型在大约300个步态周期或10分钟内成功达到目标运动学。她还表示,她希望这项工作能够为假肢调谐程序的稳定模型做出重大贡献,甚至可以用于深部脑刺激技术和外衣等设备。
近年来研究人员一直试图将VR/AR技术融入到医疗领域,并且取得了一些进展。VR行业的出现不仅在医疗领域的得到了发展,教育里面也受到了各界人士的关注,它的出现将成为教育史上一次重大改革!




发表评论 取消回复